CUBLI
Can we build a 15cm sided cube that can jump up, balance on its corner, and walk across our desk using off-the-shelf motors, batteries, and electronic components?
Overview
The Cubli is a one degree of freedom robot that can jump up and balance on its corner.
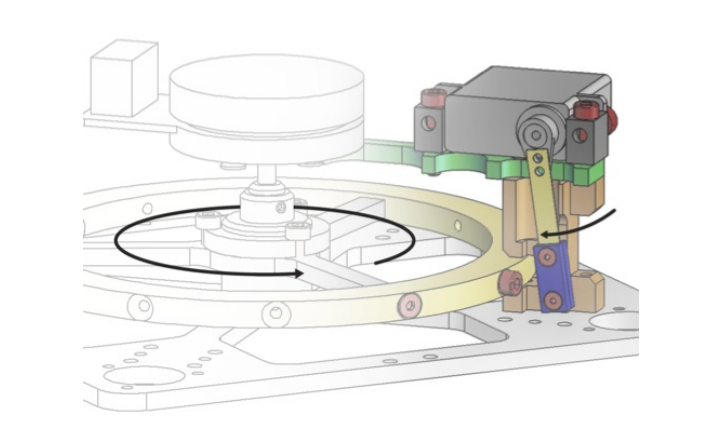
The reaction wheels mounted on three faces of the cube rotate at high angular velocities and then brake suddenly, causing the Cubli to jump up. Once the Cubli has almost reached the corner stand up position, controlled motor torques are applied to make it balance on its corner.
In addition to balancing, the motor torques can also be used to achieve a controlled fall such that the Cubli can be commanded to fall in any arbitrary direction. By combining these three abilities — jumping up, balancing, and controlled falling — the Cubli is able to 'walk'.
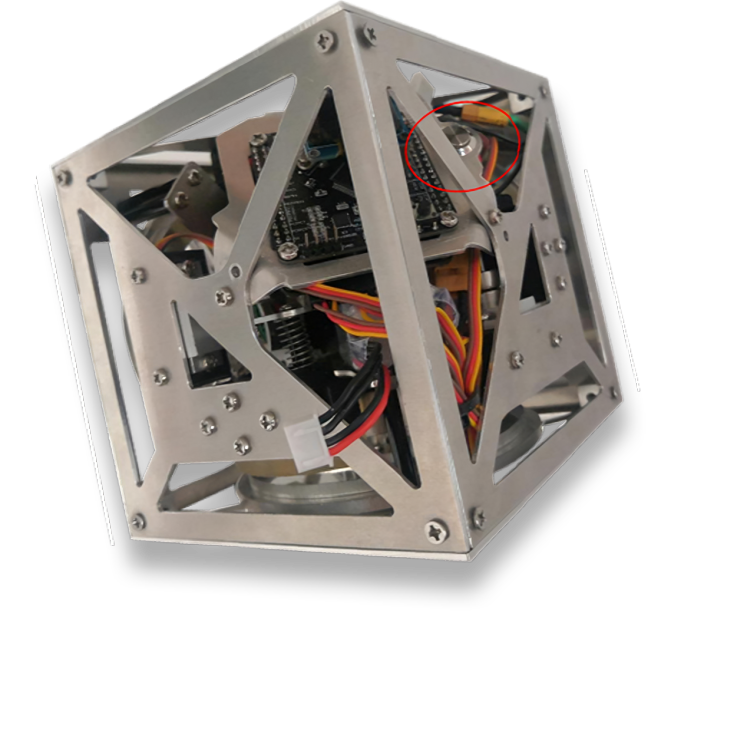
The power, computation, and control components were not mounted on the prototype to avoid making the first prototype too complex.
Specifications
| Height | 15 |
| Width | 15 |
| Length | 15 |
| Controller | |
| IMU (inertial measurement unit ) | 6 |
| DC motor | 3 |
CUBLI
The design
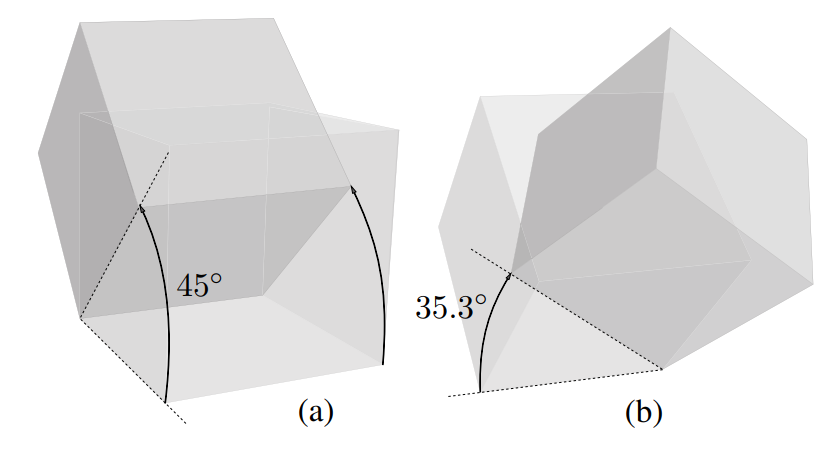
The other feature is its ability to jump up from a resting position without any external support, not only an interesting concept for the control engineer but also also an appealing demonstration for the general public.
Fig. 2 shows the jumping up strategy of the Cubli. Initially the Cubli, lying flat on its face, will jump about its edge by instantaneously stopping one of its momentum wheels. Once complete, the Cubli will provide an inexpensive, open source test-bed with a relatively small footprint for research and education in estimation and control.

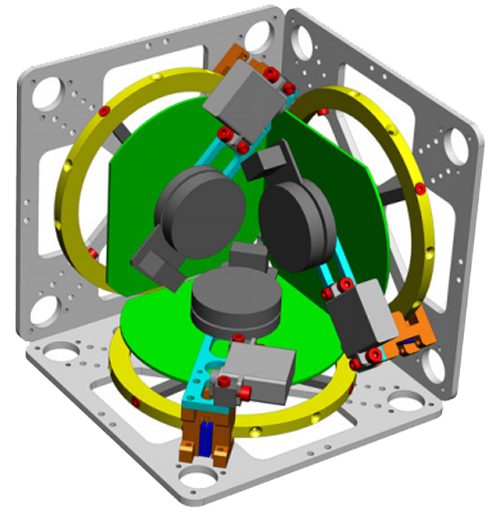
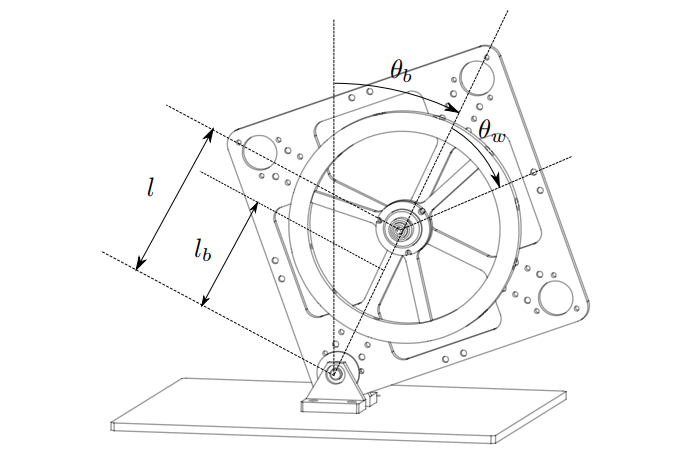
Figure 1: The CAD drawing of the Cubli with covers removed.